
Autonome auto’s kunnen fietsers nog moeilijk herkennen
Zelfrijdende auto’s worden steeds beter in het herkennen van auto’s, voetgangers, en verkeersborden. De grootste uitdaging voor de zelfrijdende auto’s is anticiperen op het gedrag van fietsers. Dat stelt Steven Shladover, onderzoeker aan de Amerikaanse Universiteit Berkley. Volgens Shladover zijn fietsers moeilijk te herkennen omdat ze klein, snel en onvoorspelbaar zijn.
Het Institute of Electrical and Electronics Engineers publiceerde afgelopen maand een rapport waarin het betoogt dat fietsers het grootste obstakel voor zelfrijdende auto’s zijn. “Een auto is visueel gezien een enorm blok, en vrij eenvoudig te herkennen. Fietsers hebben minder massa en kunnen in allerlei vormen en maten komen,” aldus Shladover.
Niet alleen autonoom gestuurde voertuigen hebben moeite met fietsers. Volgens de meest recente cijfers van Stichting Wetenschappelijk Onderzoek Verkeersveiligheid is 60 procent van het aantal ernstige verkeersgewonden in Nederland een fietser. Als bestuurders al moeite hebben met het herkennen en voorspellen van het gedrag van fietsers, hoe moeten zelfrijdende voertuigen dit nog beter gaan doen?
Communicatie-software
Samen met Ford en Trek presenteerde Tome Software vorige maand op technologiebeurs CES (Consumer Electronics Show) in Las Vegas een concept waarbij autonoom rijdende voertuigen fietsers beter kunnen herkennen. Het idee is dat fietsers worden uitgerust met een draadloos apparaat in de helm of op de fiets dat de positie vaststelt. Door middel van connectiviteit kan de zelfrijdende auto fietsers herkennen. Tome onderzoekt de software momenteel aan de Universiteit van Michigan.
Hoewel het concept vrij eenvoudig is, kleeft er een belangrijk nadeel aan, zo stelt mountainbike-magazine Singletrack. “Bij communicatie worden gegevens uitgewisseld en dan heb je te maken met verwerkingstijd. Een milliseconde kan in het verkeer al doorslaggevend zijn.”
Herkennen
Waymo gooit het over een andere boeg. Het techbedrijf leert zelfrijdende auto’s gedrag aan waarmee het fietsers kan herkennen. Zo vertelt Waymo in een blogpost “Sensoren kunnen een situatie tussen een parallel geparkeerde auto met daar in de buurt een fietser herkennen. Ook herkent onze software wanneer een fietser zijn hand uitsteekt en vervolgens linksaf slaat.”
Waymo gebruikt een techniek waarbij de software zichzelf traint door duizenden scenario’s te uploaden. Het labelt de fietsers en de software ontwikkelt vervolgens een bepaald algoritme wat op de openbare weg wordt gebruikt.
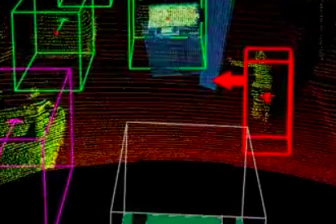
Het voordeel van de lidar-technologie van Waymo is dat het voertuig 360 graden om zich heen kan kijken en direct op situaties kan reageren. Maar of dit genoeg is voor de robotauto om gedrag van fietsers te voorspellen, blijft voorlopig nog de vraag.
Lees ook: SWOV: weinig verschil gedrag voetgangers en fietsers bij zelfrijdende voertuigen


